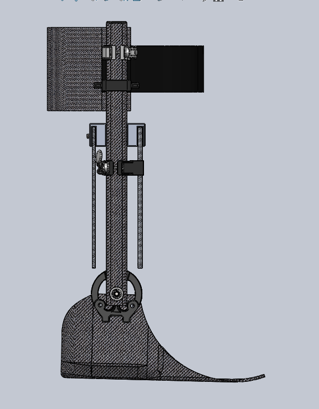
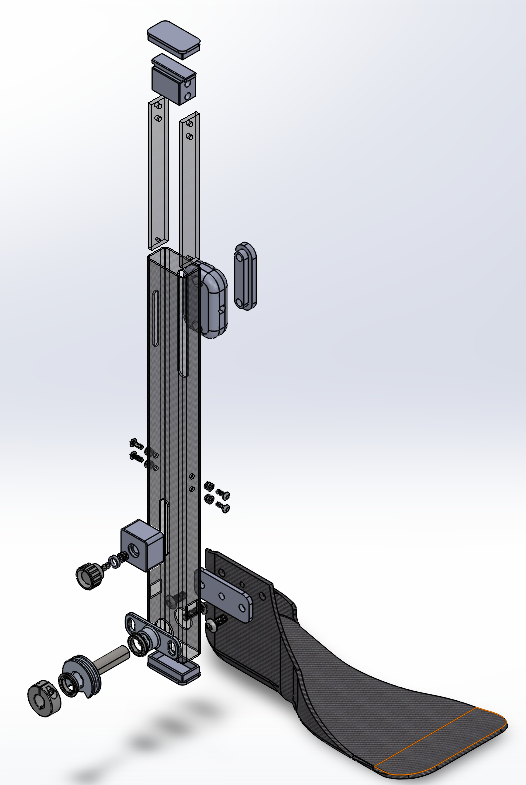
Our final iteration built off the compact design of the initial designs compact frame with a completely different powertrain. Bringing back the two-spring system, the pulley needed to be completely redesign to fit on the inside of the tubing. Using a D-shaft interface, we were able to apply our goal torque. the leaf springs are much smaller in this design yet still have great output. The torque slider block and calf cuff adjuster systems also had overhauls to be internal and work with the two spring system, incoorperating knobs for easy means to adjust.
We performed two tests to determine the duribility and power output.
The cyclic testing comprised of the team members wear the AFO in their daily lives to accumulate at least 10,000 steps. The device was more than able to handle well over the 10,000 while performing running, walking, and jumping with minimal wear. This was a good sign as it showed the device could handle day to day use at different torque levels.
The Load Cell testing involved adding a load cell to the end of the pulley system and pulling on it to see if the device could reach our desired torque output. The torque was calculated using a DAQ system that was developed in the biomechatronic lab in previous years. Initially, the device could only output 10-12 Nm, far below what was desired. However, the team decided to reinforce the slider block between the springs. With this new slider block, the output was able to hit 20Nm, just where our goals tolerance allowed.
created with
Website Builder Software .