Prototype
Design of the camera, the arm and the converter
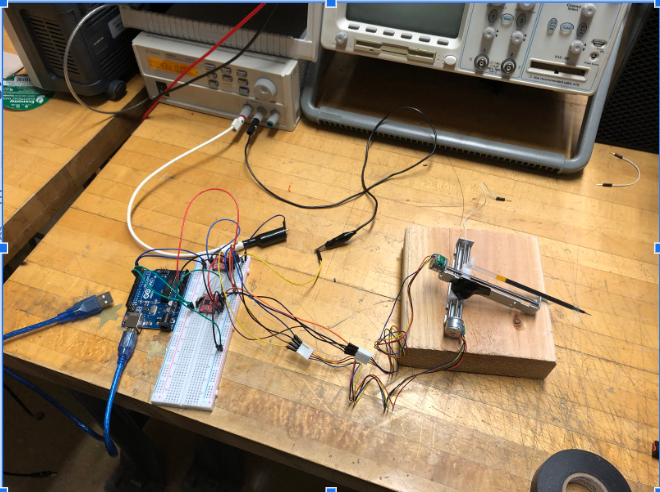
1. Arduino IDE: Load the control code of the motor driver, which is a important part of our robotic arm prototype.
2. python: To make sure the camera we use could satisfy our requirement, we use python for digit recognition.
3. 12V Drive Stepper Motors: They are the main part of our robotic arm prototype, they are used to push the buttons.
4. HD Webcam C270: The camera for digit recognition.