
Project Information
Project Location
Northern Arizona University (NAU)

Design Process
Old Cable Driven System
The old cable driven system did not provide the torque and angular rotation needed for sufficient walking assistance and rehabilitation. This design also included many loose cables and wires that posed safety risks and added a bulky appearance to the exo.

Current Belt Driven System
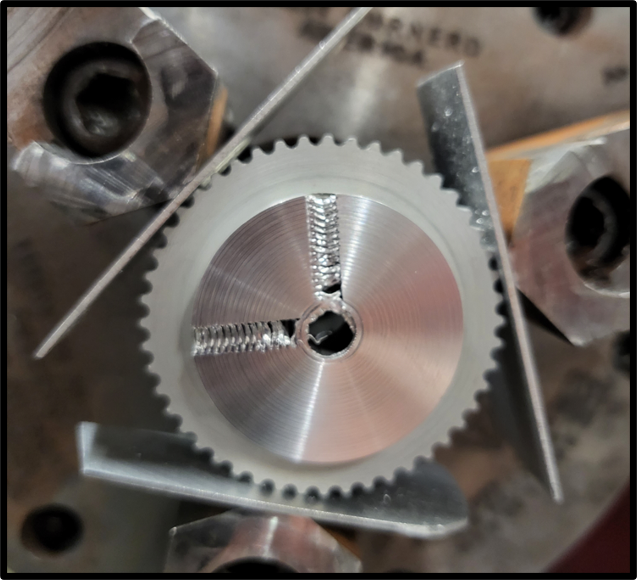
The new direct drive system improves power and safety while maintaining a low weight and low profile for a much better experience for the user. All of the belt drive components are contained in the compact enclosure, which increases safety, reliability, and aesthetics.

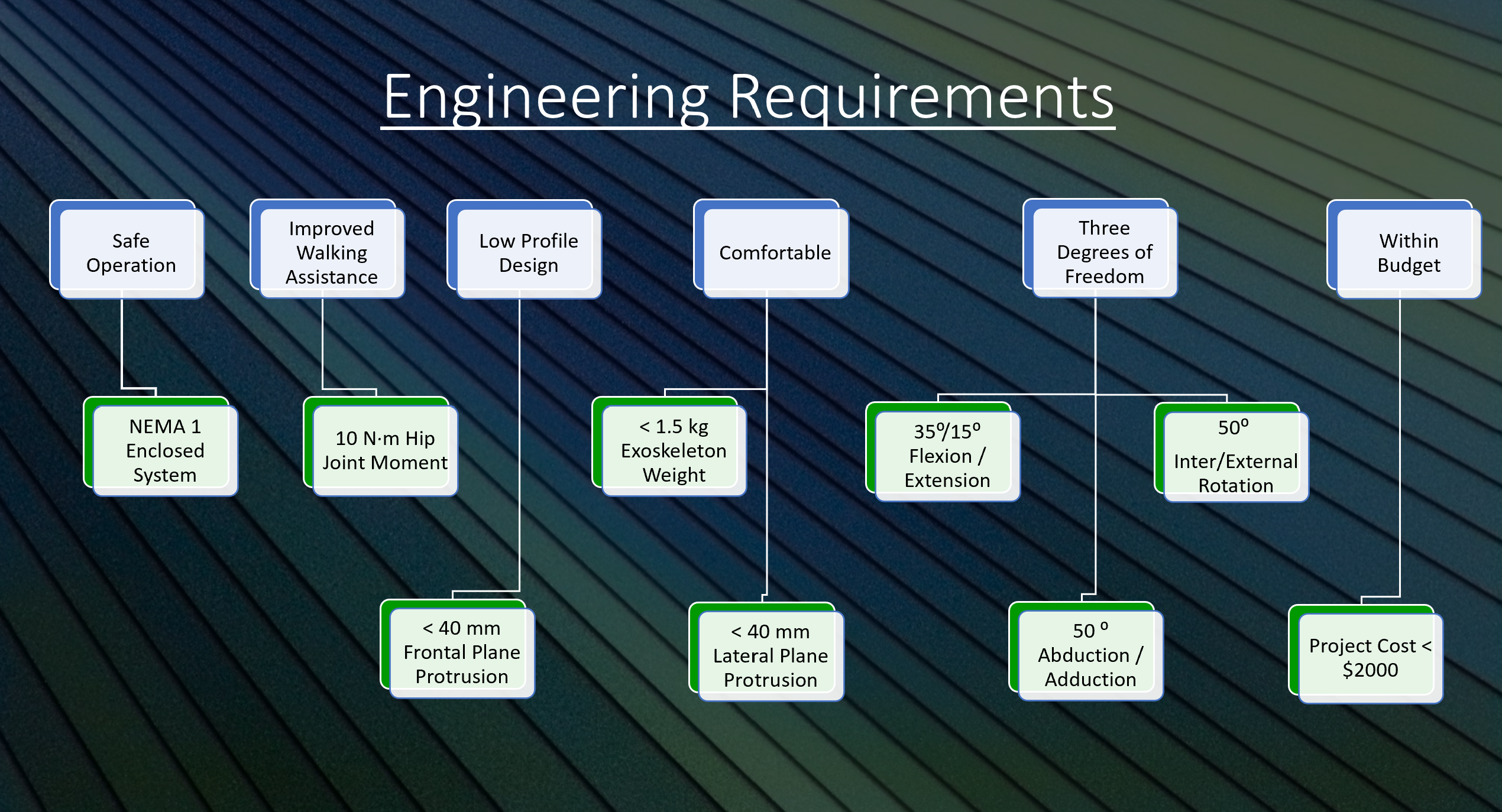
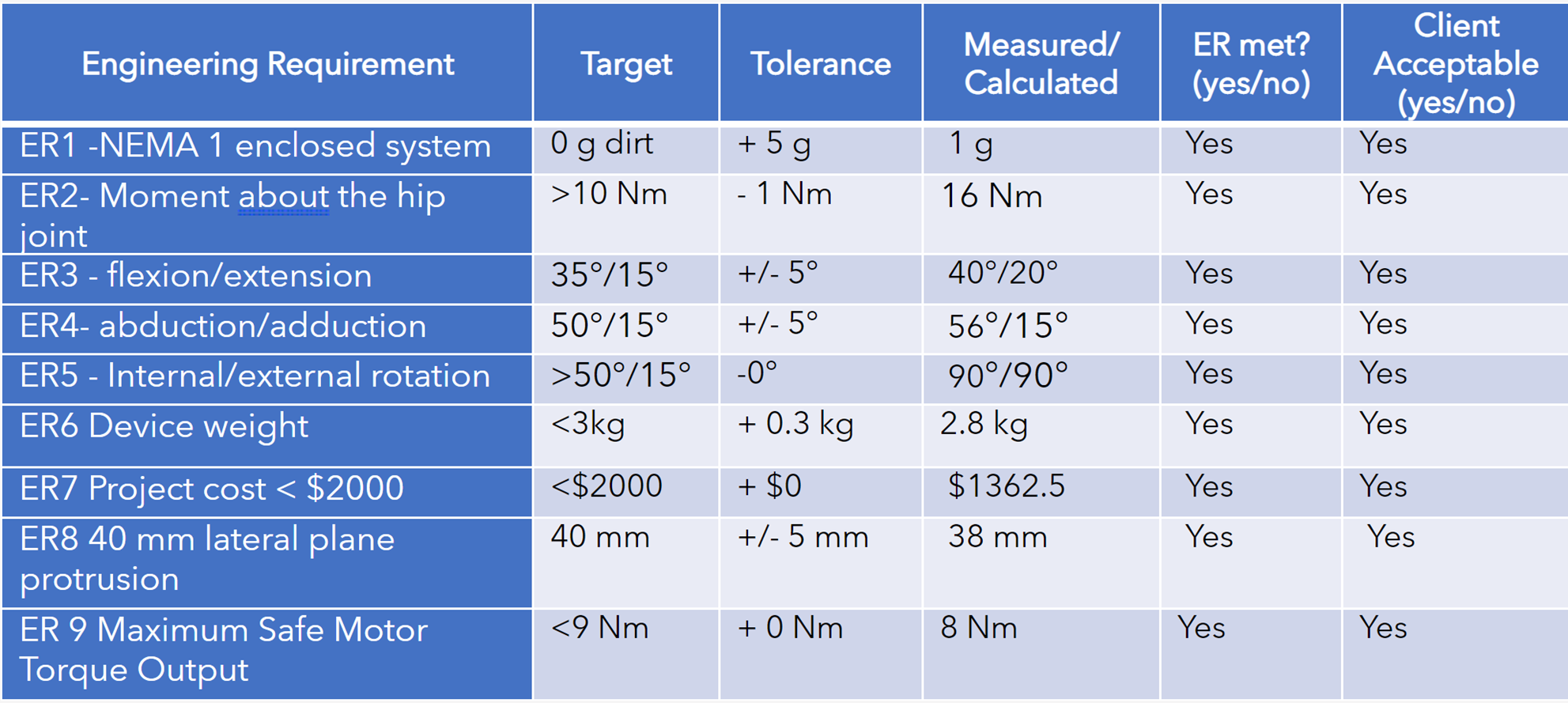
Customer & Engineering Requirements

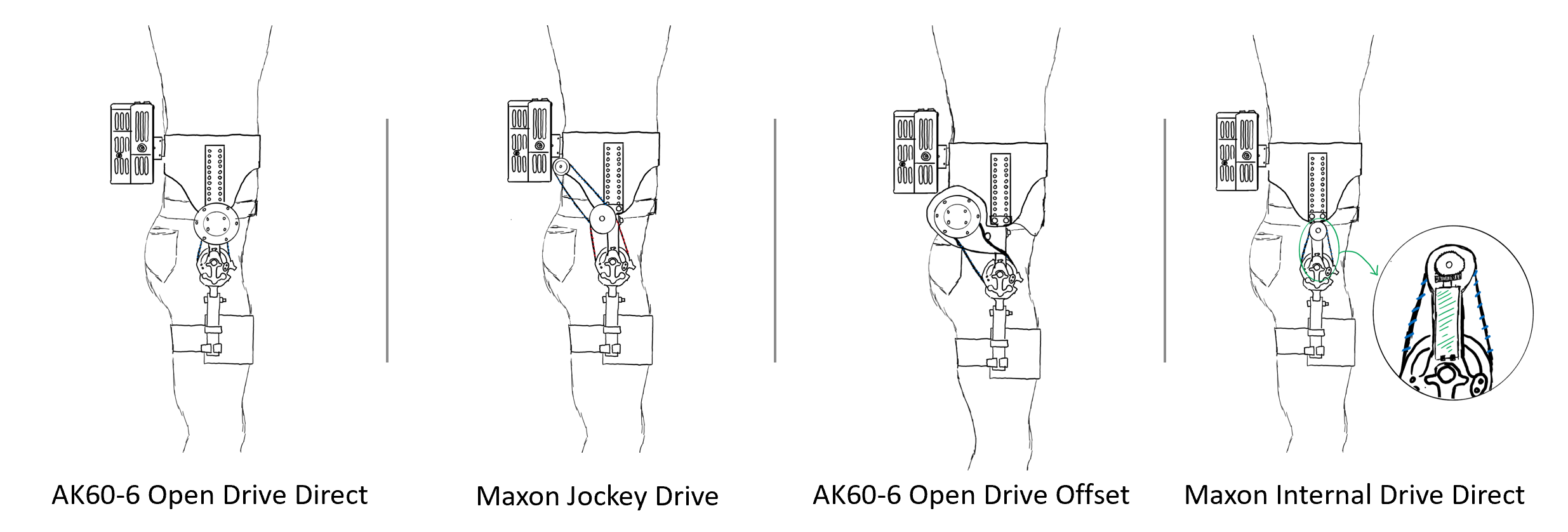
Original Design Brainstorming
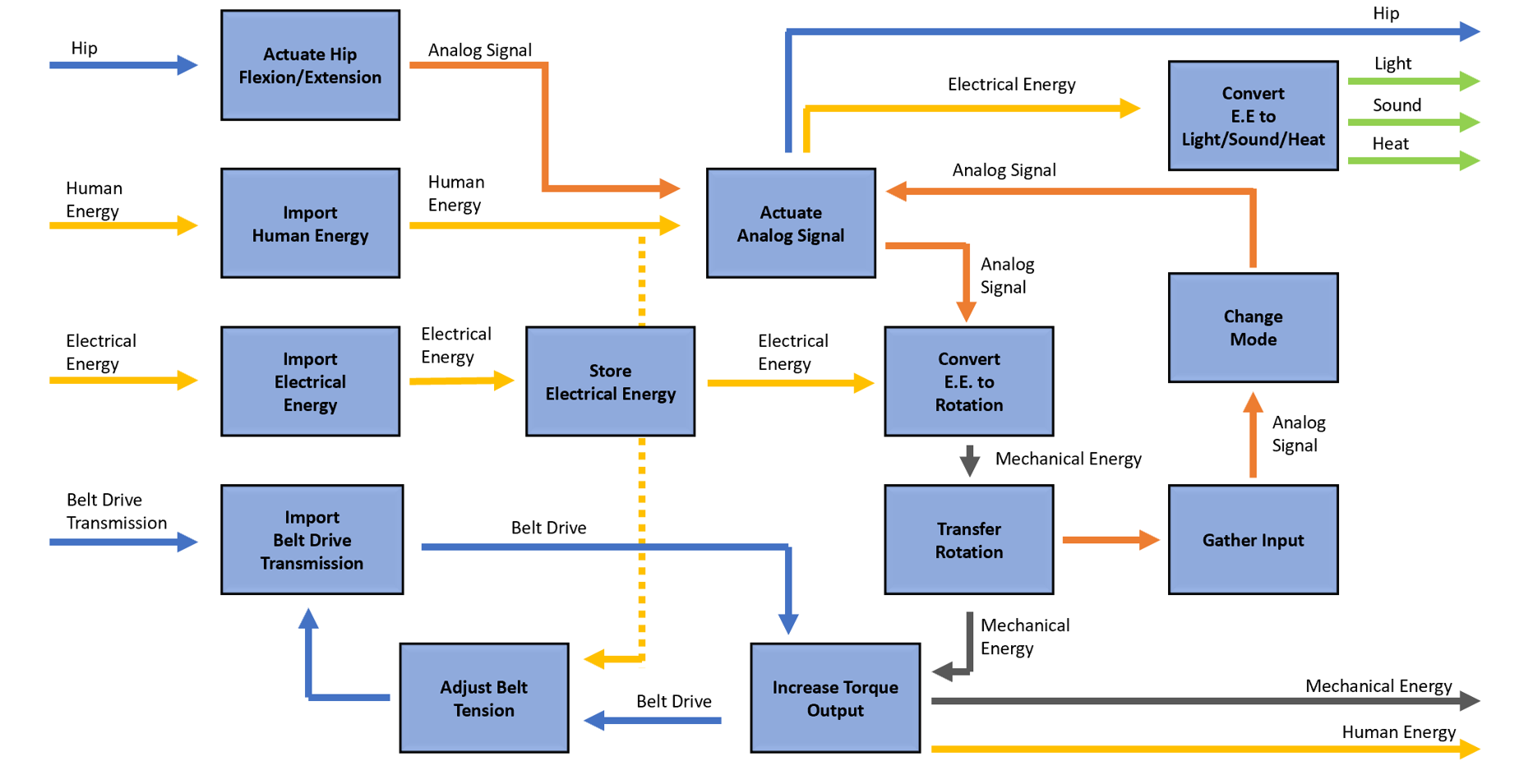
System Flows
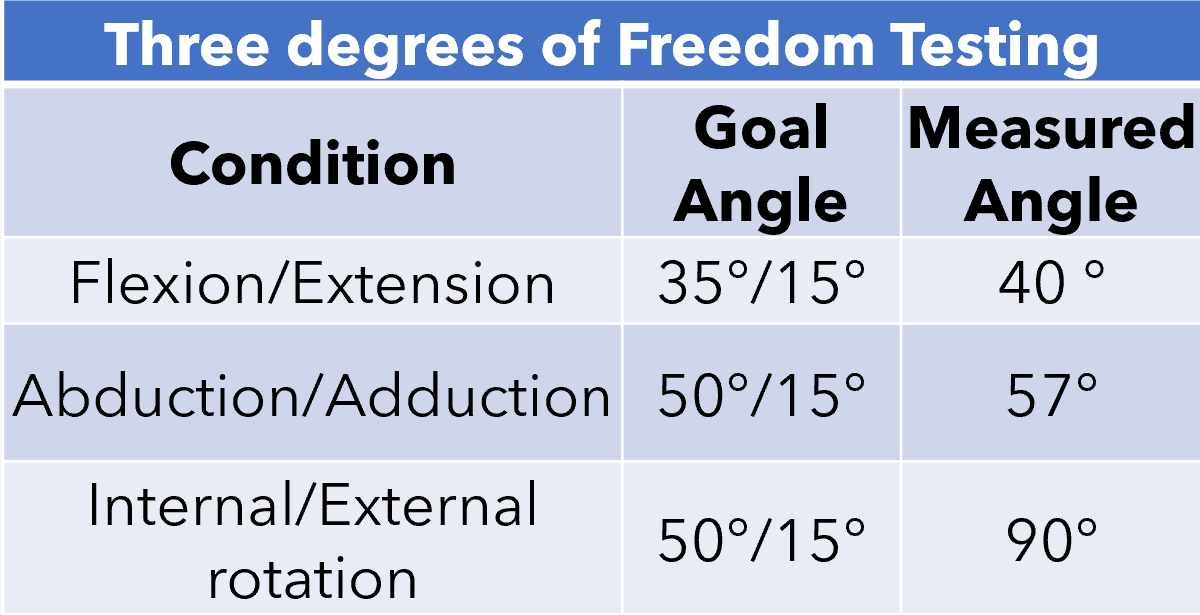
Testing & Procedures
Failure Modes and Effects Analysis

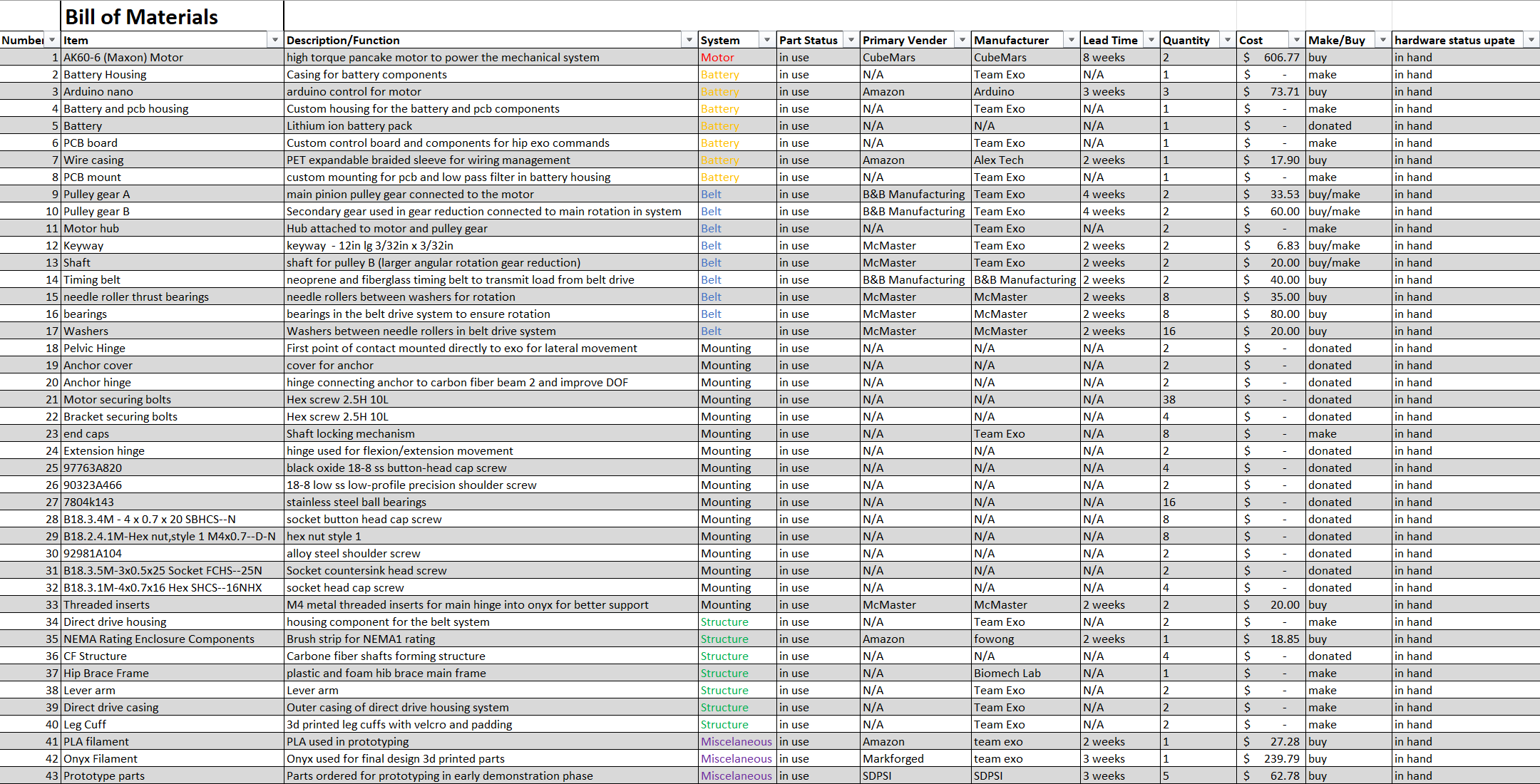
Bill of Materials
Control Systems
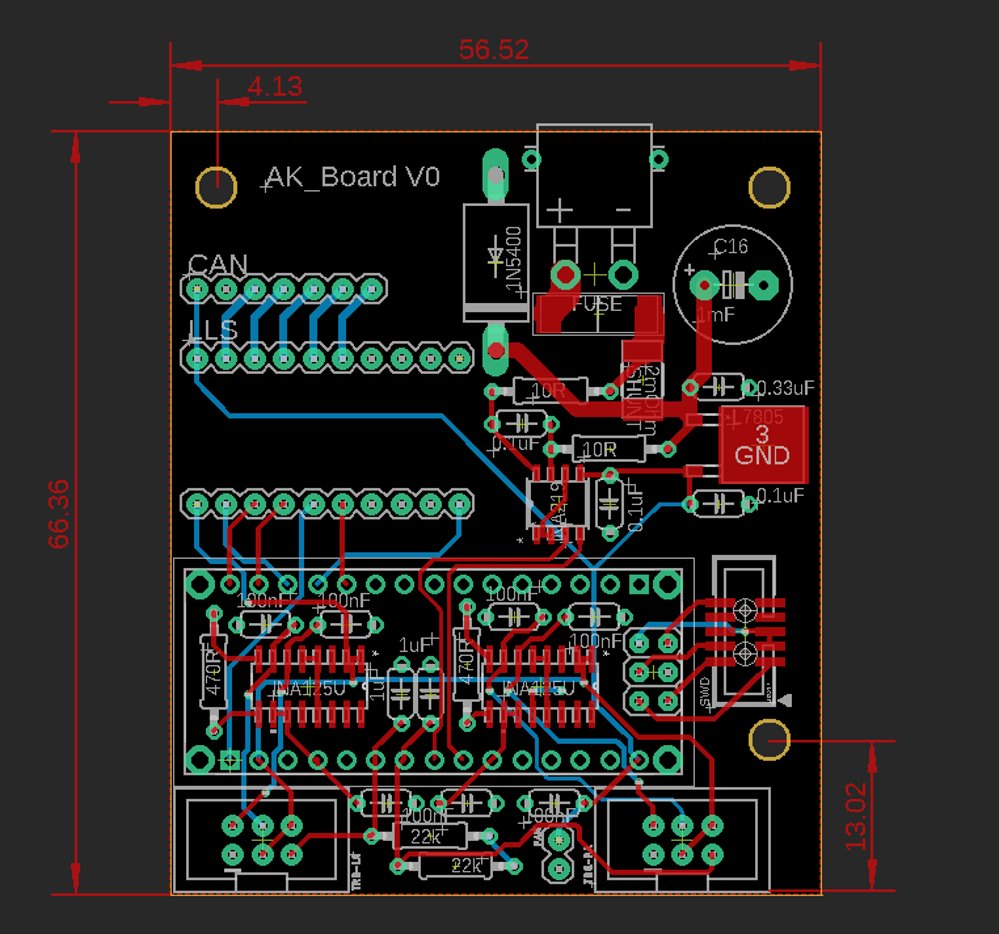
PCB Schematic
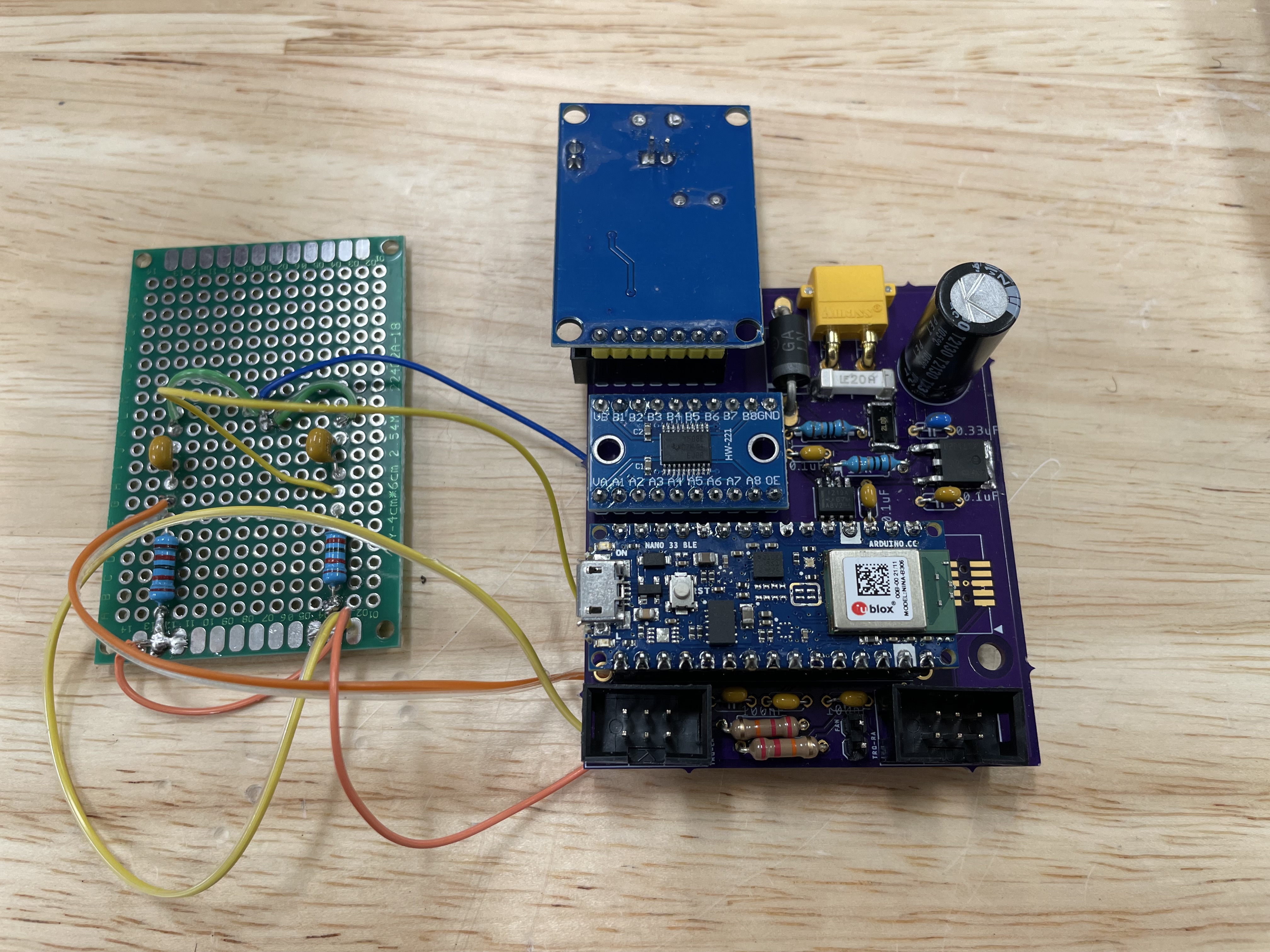
PCB connected to low pass filter
Manufacturing








Testing
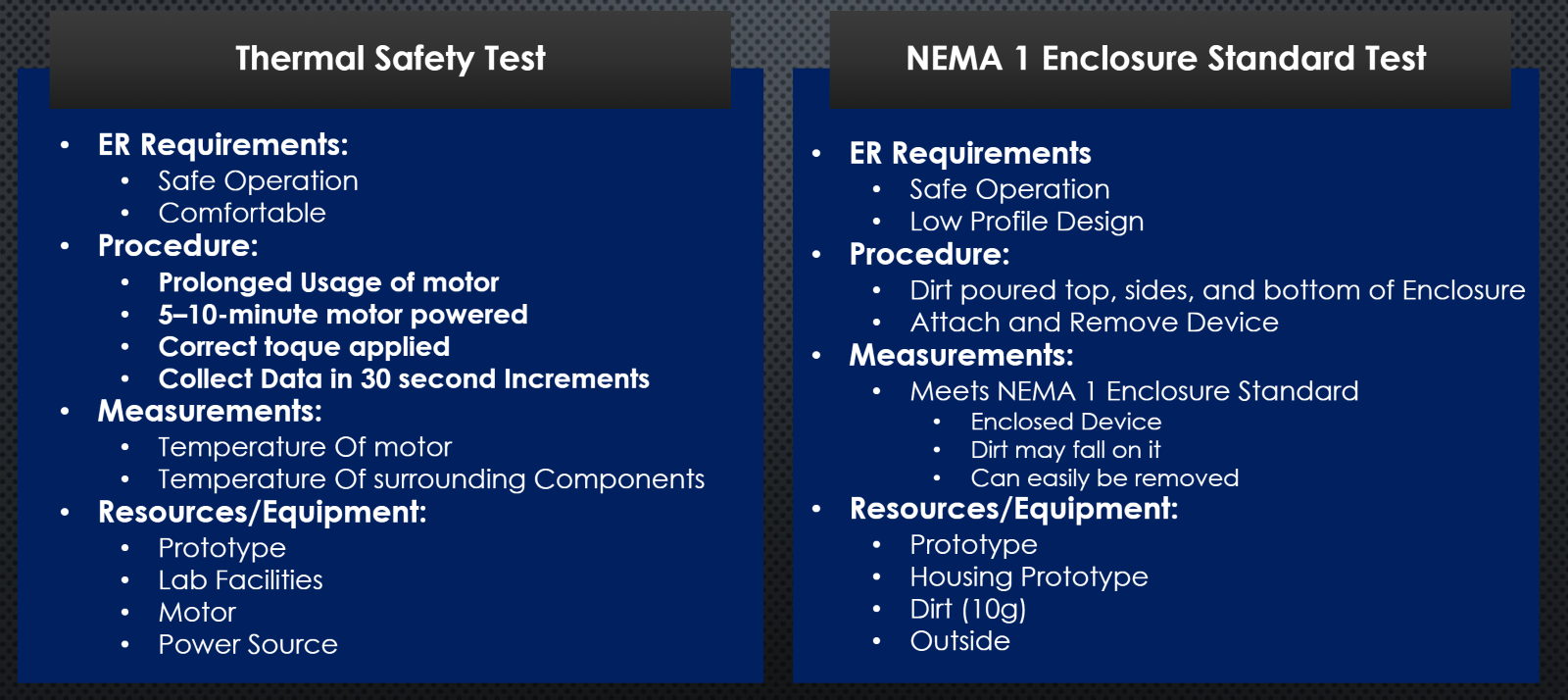
NEMA 1 Enclosure testing
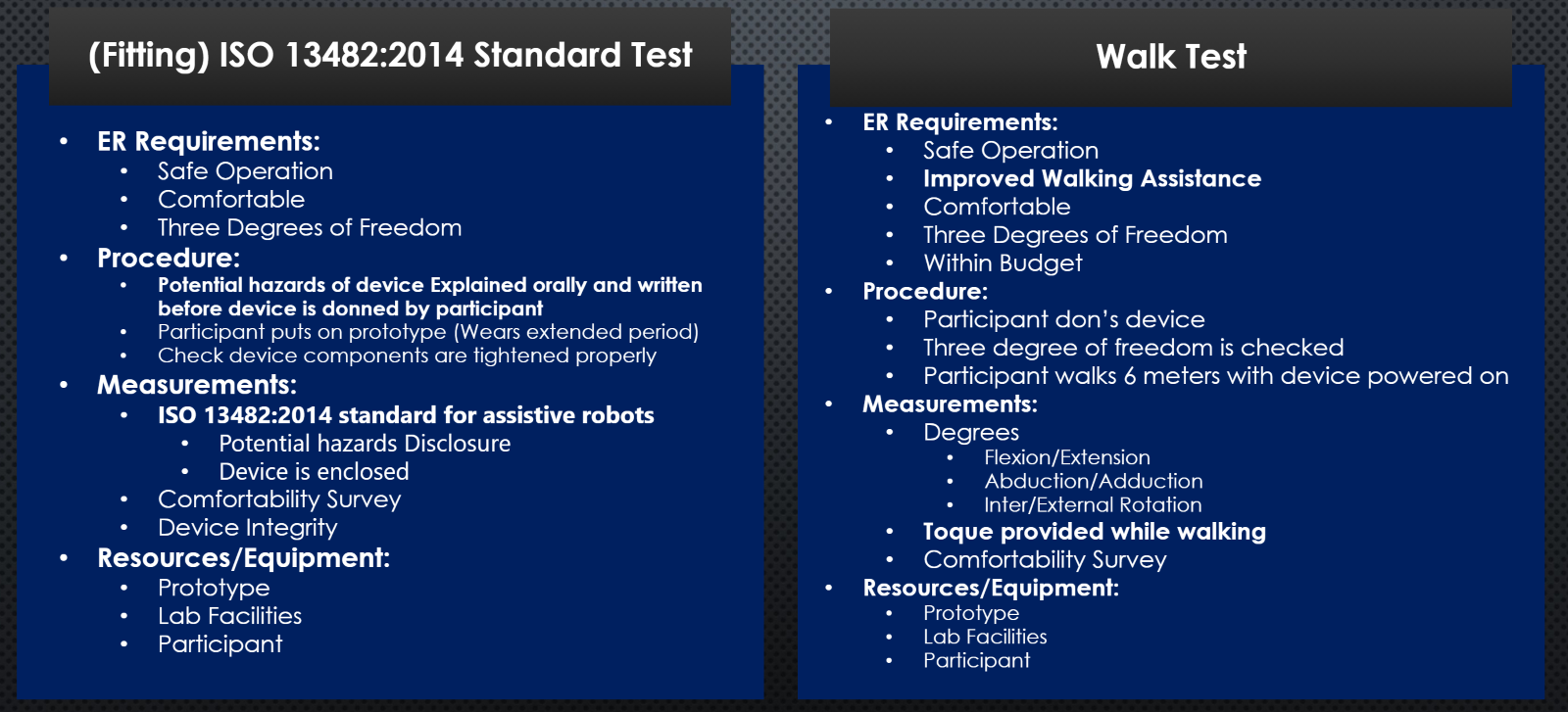
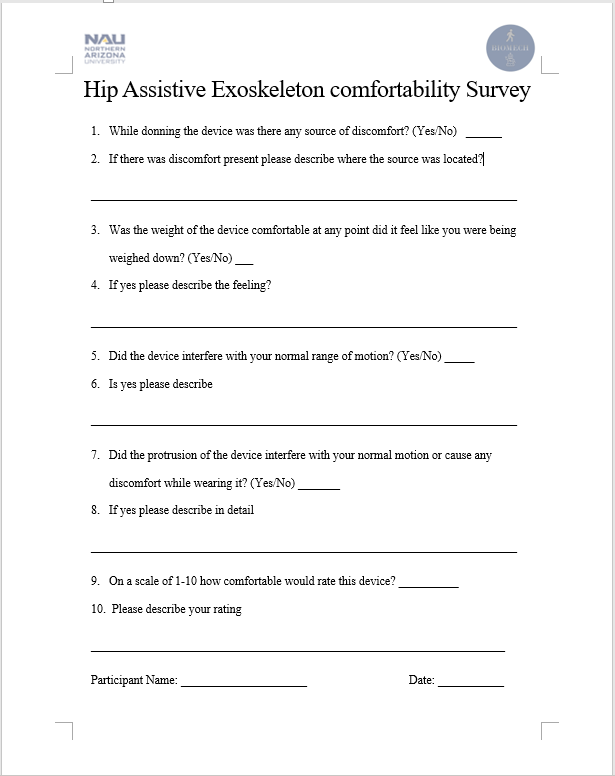
Fitting Test



Thermal Safety Test

Walk test
Future Work
Research shows that hip exoskeletons can reduce the metabolic energy consumption in participants during use [1]. Metabolic consumption is an important factor for those with walking impairments. There are many benefits to reducing energy consumption for the participant. Results shown in figures 1 and 2 display that up to a 7% metabolic reduction was seen from an unpowered exoskeleton in a peer reviewed study.
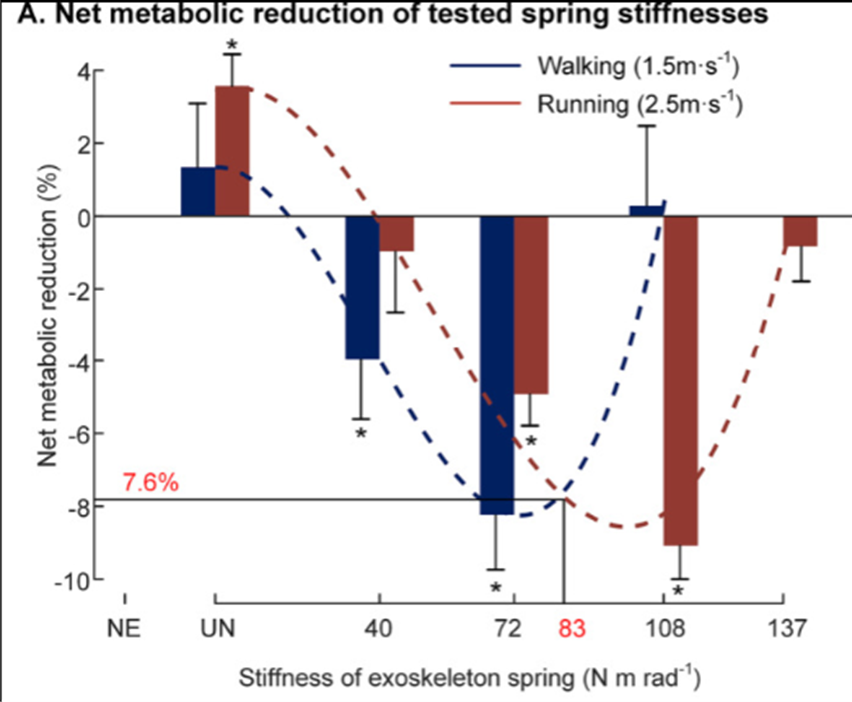
Figure 1 [1]
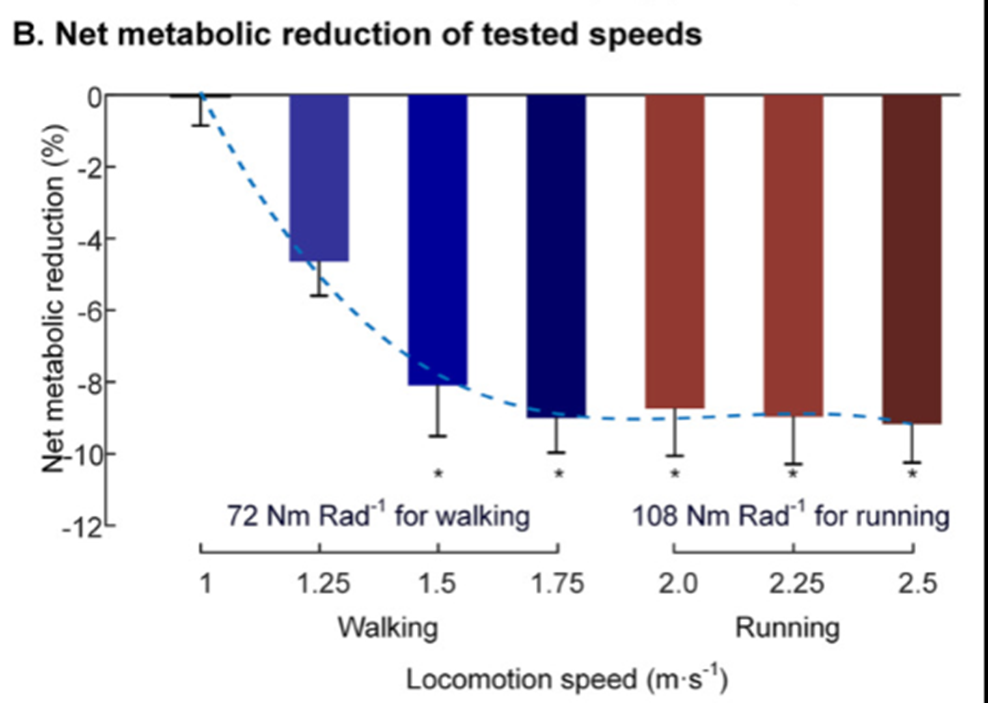
Figure 2 [1]
Future work includes proving our device is capable of metabolic reduction by conducting tests with and without the device to compare their heart rate, breaths per minute, and similar factors. We believe that our powered exoskeleton has even more potential to reduce metabolic consumption and look forward to testing for similar results.
References: [1] T. X. C. Z. J. e. a. Zhou, "Reducing the metabolic energy of walking and running using an unpowered hip exoskeleton," J NeuroEngineering Rehabil, vol. 18, no. 95, 2021
Last updated April 29th, 2022