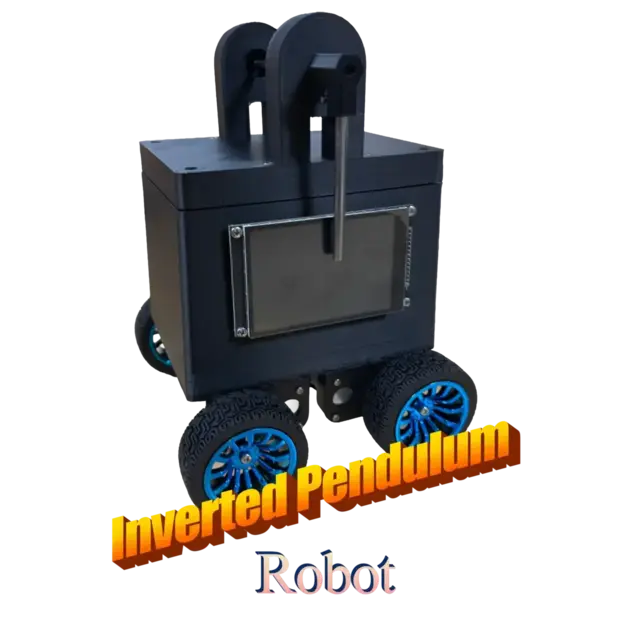
An Inverted Pendulum Robot used to demonstrate real-time physics concepts.
The Inverted Pendulum Robot is a two-wheeled inverted pendulum designed to demonstrate real-time feedback control and dynamic stability for K–12 STEM outreach. The robot actively balances itself by measuring its tilt angle, computing corrections through a PID controller, and adjusting wheel motion to stay upright. This allows students to interact with the robot physically while observing how control systems respond to disturbances.
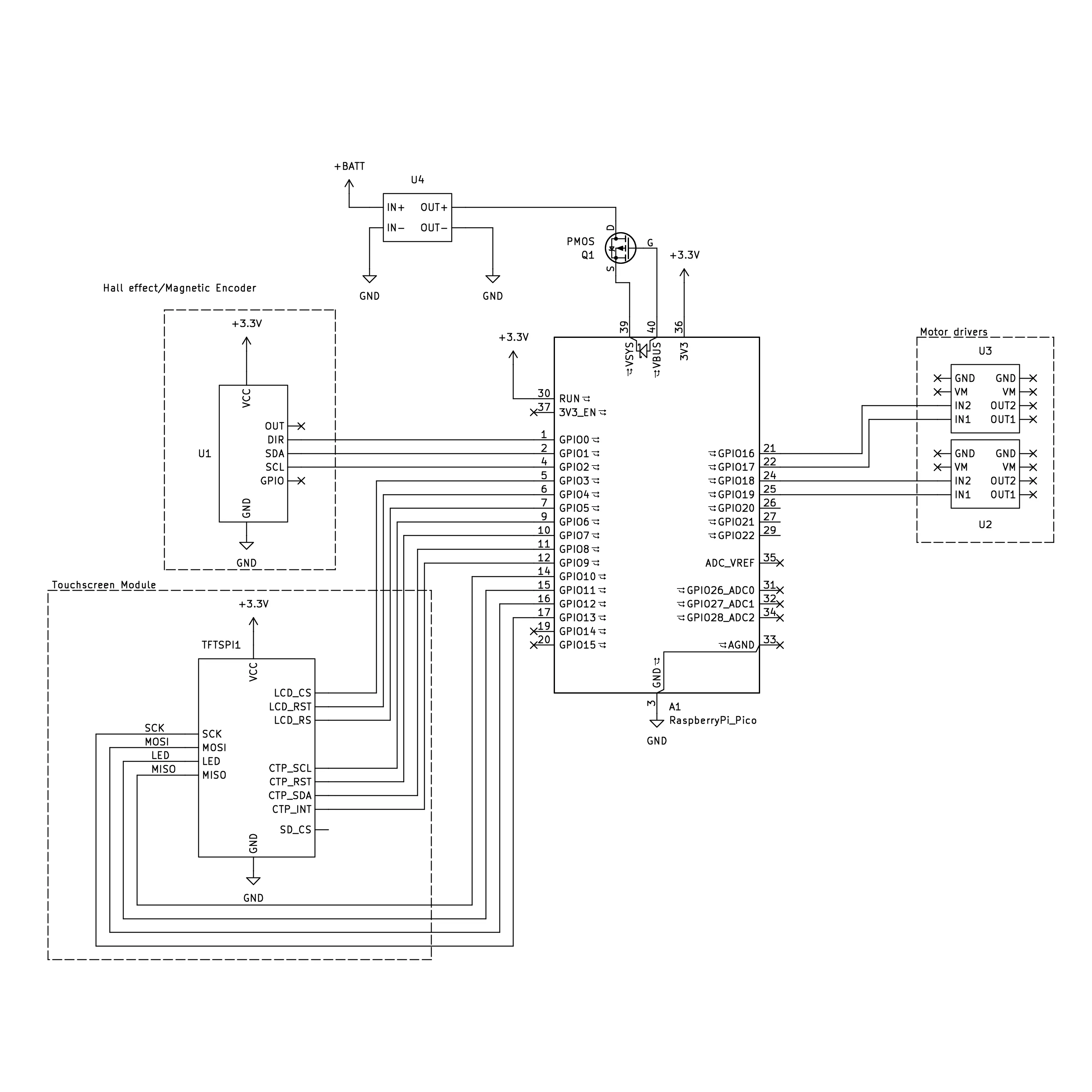
The mechanical frame was 3D printed, allowing for quicker mass-production so the robot can make it out to more schools quicker. The system integrates an RP2040 board, quad-DC motors with encoders, a magnetic encoder for tilt sensing, a layered chassis for organized electronics, and a touchscreen for classroom interaction. All components were selected to be low-cost and quickly mass-producible.
This robot serves as a hands-on demonstration of core engineering concepts such as system modeling, instability, feedback loops, and controller tuning. It also lays the foundation for future enhancements, including expanded data visualization and improved user interaction for classroom demonstrations.
Parts List
|
|
DC Motor with Encoder |
|
|
TMC2208 Motor Driver |
|
|
Magnetic Encoder |
|
|
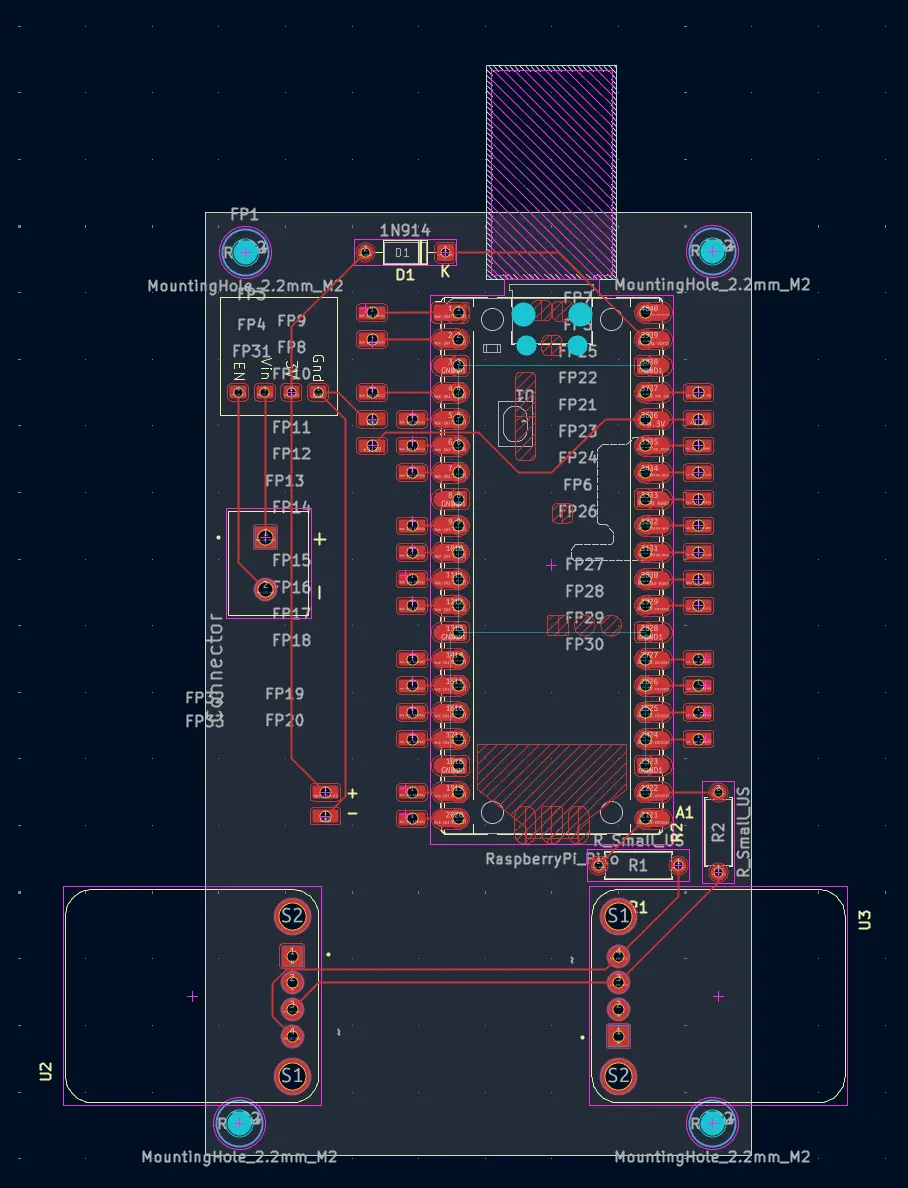
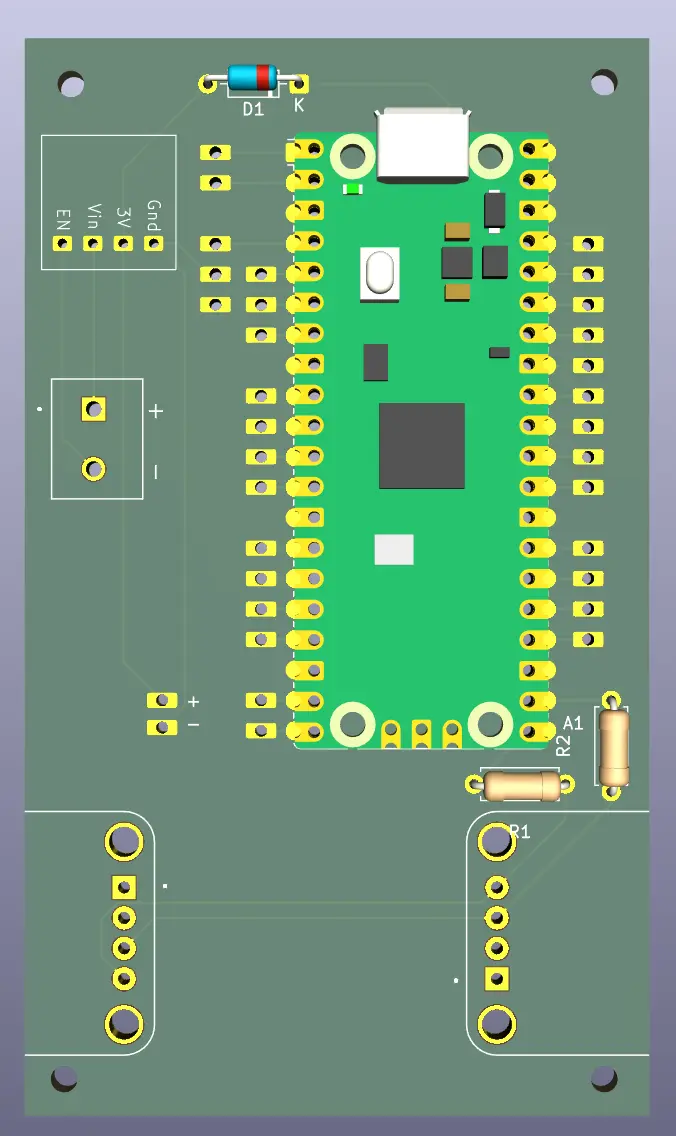
Raspberry Pi Pico / RP2040 Board |
|
|
ST7796S 4.0" LCD Touchscreen |
|
|
3.2V LiFePO4 Battery |
|
|
4S 30A 12.8V BMS |
|
|
14.6 Volt 2A Battery Charger |
|
|
3.3V Buck Converter |
|
|
470uF Electrolytic Capacitors And 1A 20V Schottky Diode |