About Project Wilbur
Goal: Develop a control software for our client's robotic/pneumatic nipple prototype.

Project Description:
Our client Dr. Mayerl, lead of NAU's Mayerl Lab, believes that features in a robotic nipple can be manipulated and researched to benefit infant feeding difficulties. He's spent several years using Data Collection machines, Xrays and biometric measurements to research how the test subjects, piglets, adapt to different nipple stiffnesses and milk viscocities. Pigletts are used because their anatomy and physiology is similar to that of a human infant.
In fall of 2023, Dr. Mayerl submitted a grant proposal to the NIH to fund this next phase of research. Our job is to create control software for the robotic nipple that is being built by Ph.D. BioMechanic Engineers. The prototype is expected to arrive in early January of 2024. To execute our vision we plan to design a front end, back end and an interface between the backend code and the prototype that can be easily be manipulated to fit new prototypes. The mechanical engineering team we are working with are currently in their second semester capstone, meaning they will be graduating at the end of this semester. The majority of the coding will take place in Spring.
Requirements:
We developed requirements through biweekly meetings with our clients and discussing different issues amongst the team.
Front End Requirements:
-
Functional:
- UI and front end functionality developed in Qt using Visual Studios tool integration for Qt.
- Menu Bar and Navigation
- Tooltips for grid elements to provide instructions or information after hovering.
- Individual control buttons for prototype duct systems.
- User entry of flow rate for each reservoir in the corresponding grid for each duct.
- Check and balance to prevent the user from shutting all three ducts simultaneously.
- Simulation Mode
-
Non-Functional:
- Adherence to the ACM Code of Ethics.
- Visual Impairment Considerations.
- Color Blindness Considerations.
- User-Friendly Design.
Back End Requirements:
- Functional:
- Implementation of an intermediate function between the Arduino and front end to ensure correct translation of data
- Translates signals from the front end into state changes on the robot.
- Non-Functional:
-
Accuracy:
- Consistent
- Reset to neutral after use
-
Modular:
- Future-proof
- Able to use other robots
Simulator:
-
Functional:
- Purely front end simulation
- Microcontroller configuration
- Returned values
-
Non-Functional:
- The simulator’s response time must be the specified time of 3 seconds or less
- The simulator code adheres to conventions of the entire system
- Mimic prototype as closely as possible
Solution:
Our solution will be a desktop application that directly controls the prototype through communication with the Arduino.
Technologies:
- C++
- Qt
- Arduino
- Visual Studio
- GitHub
- ADInstruments
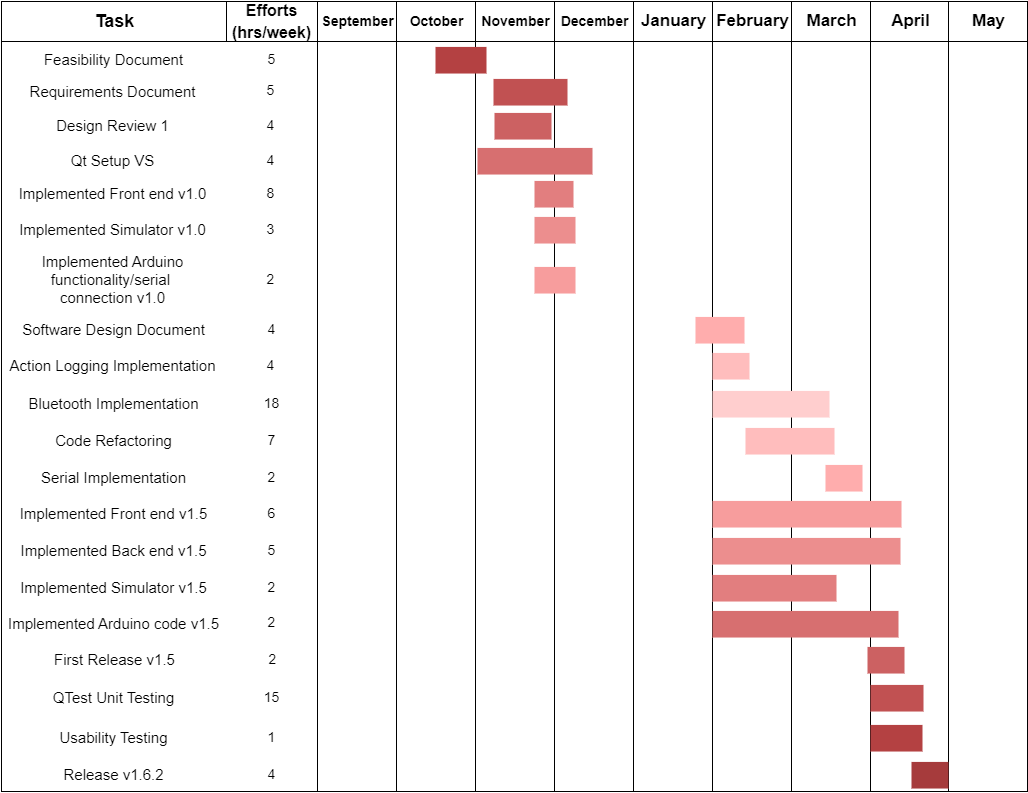
Development Schedule 2023-2024:
Codebase:
To come once project is completed.
Expected to be finished by May 9th, 2024