Fully Active Chain and Sprocket Ankle Exoskeleton for Rehabilitation Assistance
The Next 'Step' in Biomechatronics
Main Content
The Future Exoskeletons Leads Us
Many humans, from children to adults, live with mobility impairments. Some of these conditions may be innate at birth or develop as they age. Gait disorders may develop from other medical conditions that the person develops throughout their life, including Parkinson Disease. These conditions may cause uneven force distribution and a loss of balance to develop in the body while moving from place to place. In this project, a fully-active chain and sprocket ankle exoskeleton system was developed to increase the mobility and stability of the user.
Our client is Dr. Zachary Lerner, the cofounder of Biomotum and the facilitator of the Biomechatronics lab at Northern Arizona University (NAU). We worked with him and his laboratory in the development of this ankle exoskeleton system. While more future work can be conducted in order to break through the limits of the current exoskeleton system, this provides 'the next step' for future exoskeleton systems.

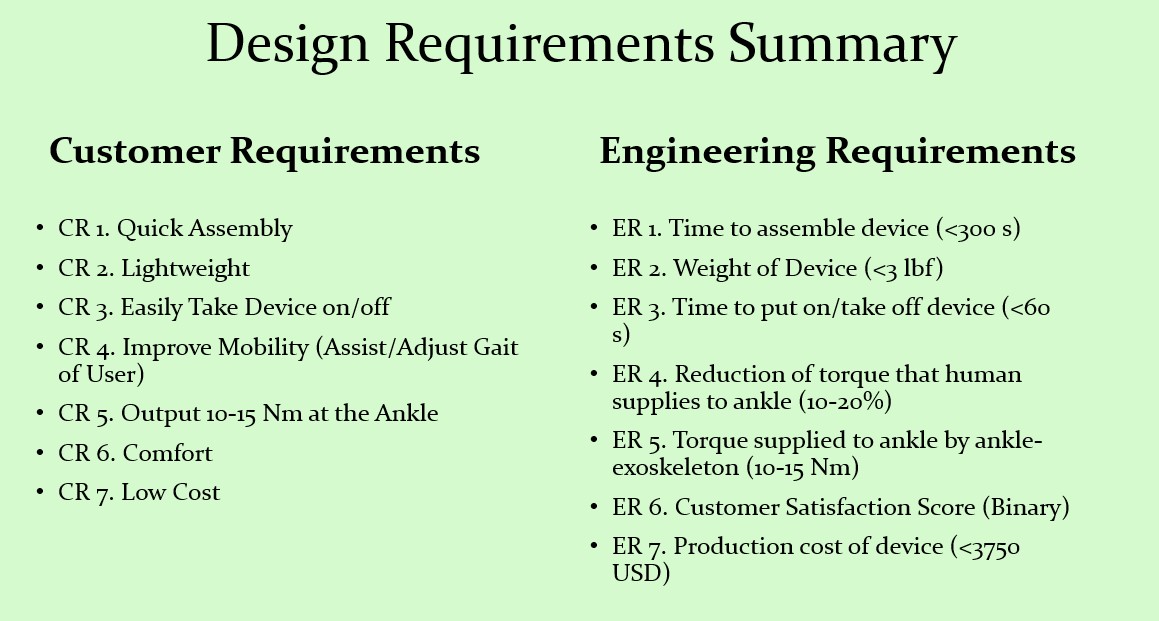
Design Requirements
The table shown indicates the finalized customer and engineering requirements of the device. Customer requirements and goals that the client desires, while engineering requirements are the quantifiable targets in order to achieve those aspirations. All requirements except customer and engineering requirements 4 and 5 have been met by the exoskeleton. Future work on the device can improve the efficiency and torque output to meet and exceed the expected ranges.