Project Description
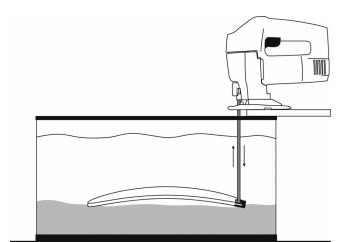
Many animals bury in substrate to avoid predators, to hide and ambush prey, or to escape unfavorable environmental conditions. A variety of fishes are able to bury by forcing water into the substrate to convert the solid-like substrate (particles) into a liquid-like substrate, a process termed fluidization. One model system for studying how fishes are able to bury themselves is the flatfishes: flounder, halibut and sole. During the burial behavior, these laterally-compressed fishes undulate their bodies against the bottom, which forces water down, into the substrate. As the water rebounds from the substrate, it carries substrate particles up into the water column, above the fish. When the water velocity decreases, the substrate particles fall out of suspension, covering the fish’s body. In the Gibb lab at Northern Arizona University, we are interested in using behaviors of living animals to inspire biomimetic robots. For this project, flatfishes would be used as a template for a simple, self-burying robot that may eventually be modified into a more sophisticated mechanism to complete human-centered tasks. For example, self-burying robots could be used to camouflage surveillance drones, or serve as a component of boat anchors that are able to sink themselves into sandy bottom habitats. In addition, “flatfish” robots could allow us to test ecologically relevant questions about the limits to this behavior that are often not tractable to address using living organisms (for example, what substrates are too heavy to fluidize? what body shape is best to facilitate rapid burial? etc.).

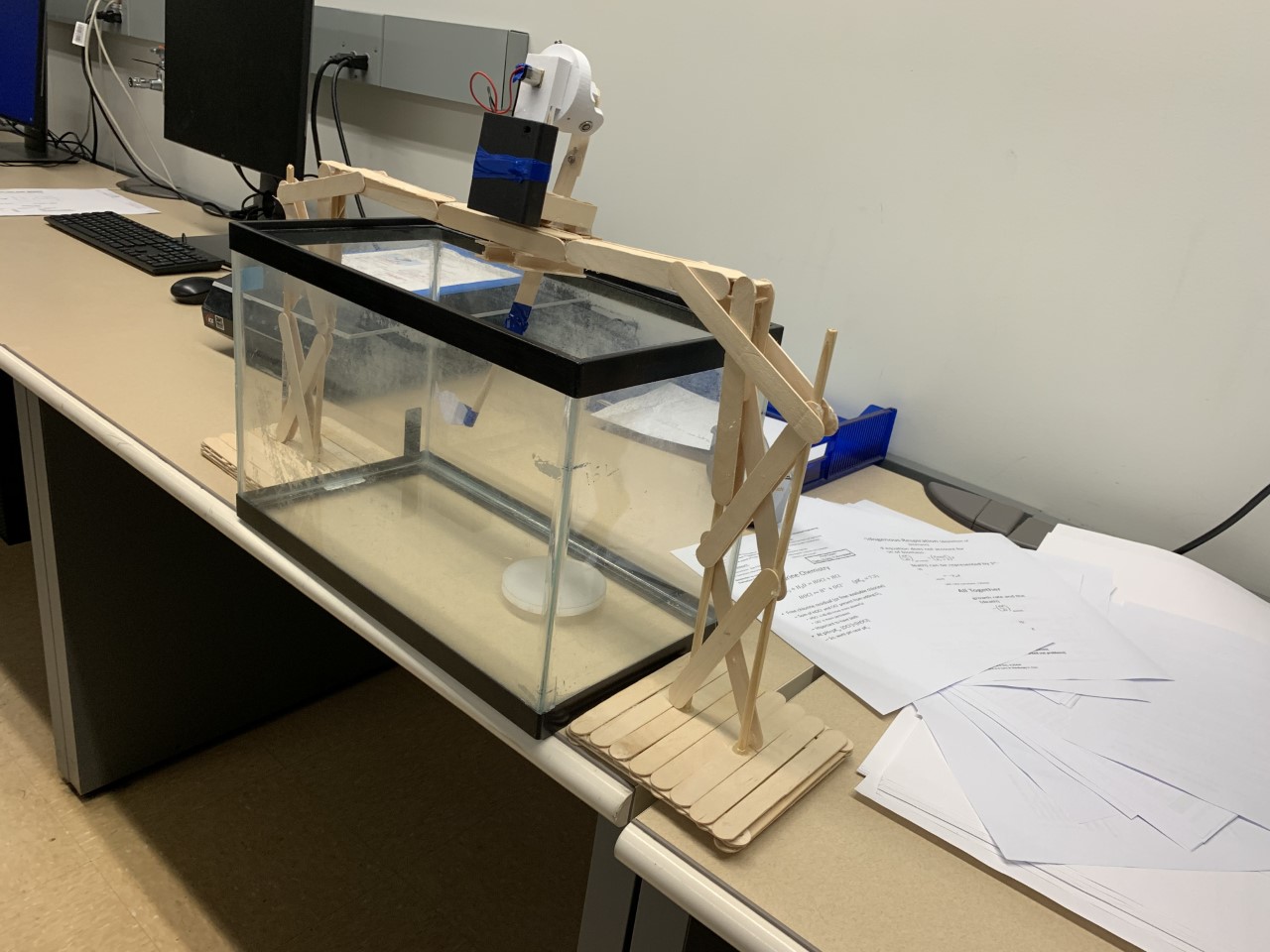
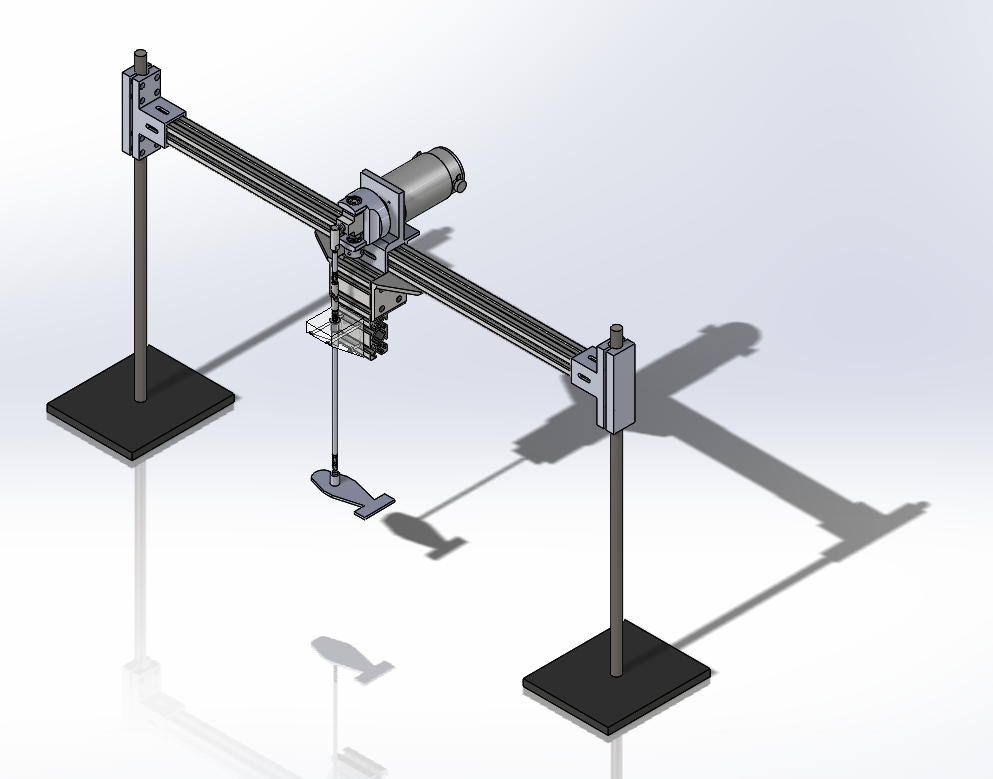
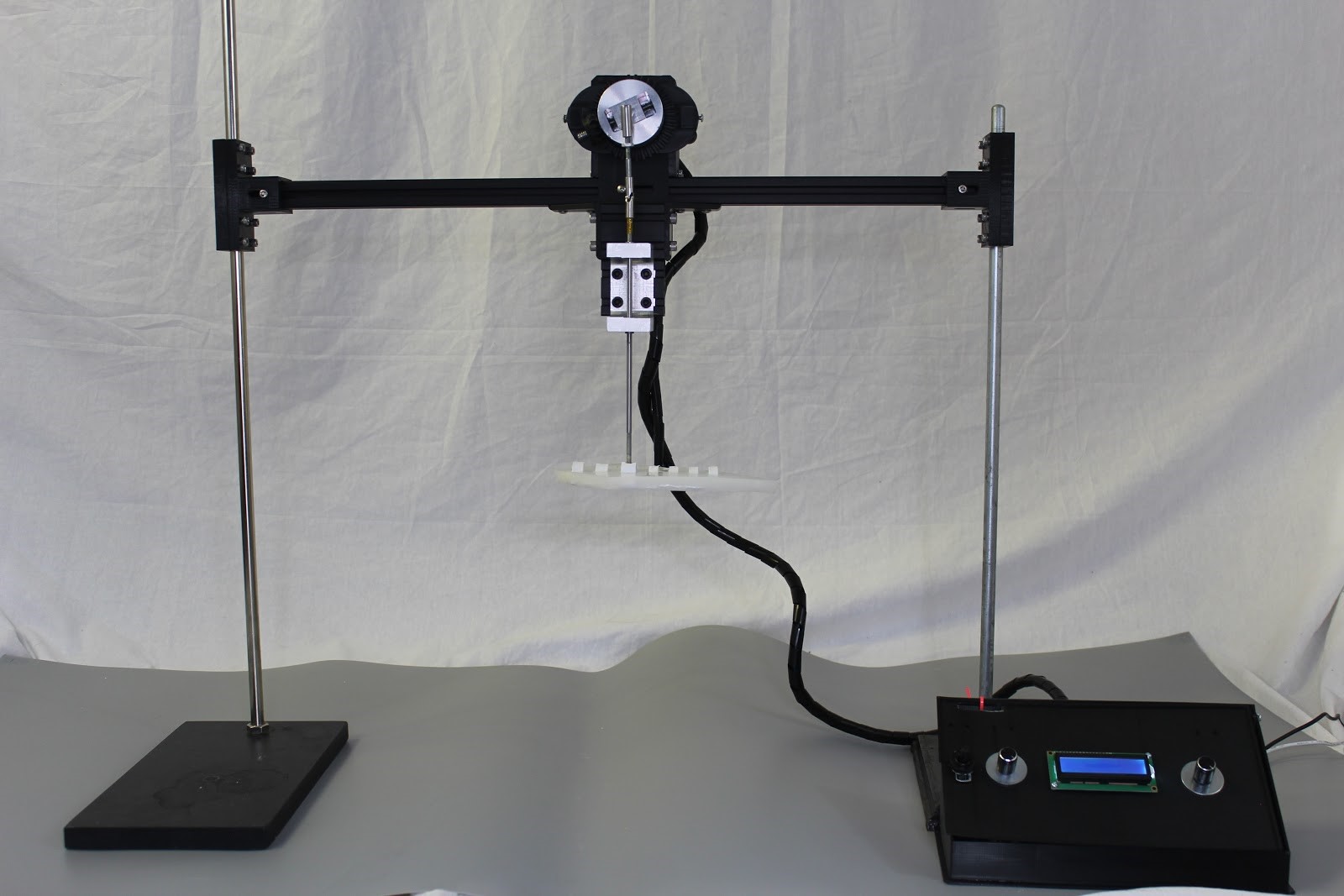
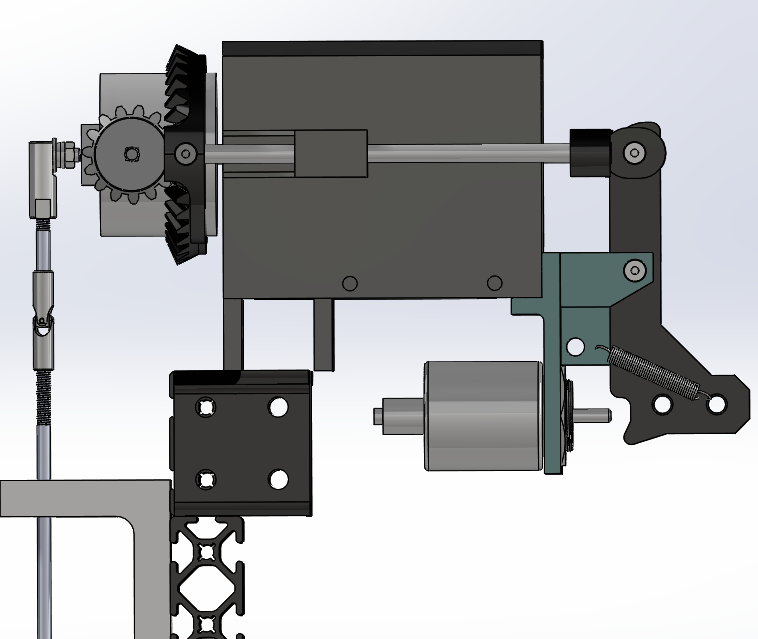
Gallery
Images related to this project.
Documents
Team Members
James Brooks
Nathan Servis
Abdulrahman Alnebari
Shuaib Alshuaib
Contact Us