Ground Robotics Platform for Predictive Communications
We plan to implement a test platform to implement and test predictive
communication protocols with the objective of minimizing transmission power.
—————————————————— —————————————————
PC - send message - robot
DETAIL
———————————————— —————————————————
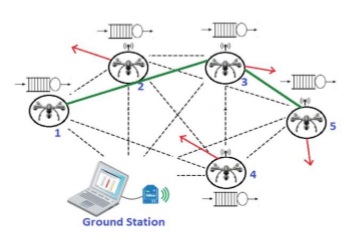
Executing a standard shortest path algorithm at time t=t0 with no prior information about
the motion trajectories of the nodes yields the path (1 - 3 - 5) (left hand side). However,
in a dynamic topology, the transmitted packet meets node 3 at time t=t1 (right hand side).
Apparently, at time t=t1 with the new node locations, the previously chosen path is not optimal
anymore, since another path (1- 4- 5) is shorter. if the source node would have taken into account
the projected network topology at time t=t0, it would have chosen the optimal path (1 - 4 - 5) at the first place.
PROTOTYPE1
———————————————— —————————————————
first semester's research
Our research phase consisted of us dividing the research topics amongst our group members. We Researched many aspects of
predictive networking and its applications. Our main research focus point was finding the most suitable Localization system,
the remaining minority of research time was devoted to finding a platform that suited our needs, and researching the best
microprocessor and accompanying programming language that suited our needs.
Our design
Based on our research, we found that the most adequate form of localization for our project would be a mixture of Camera
recognition and LIDAR. To confirm our design choice we inputted the alternatives into a decision matrix which alsop yielded this result.
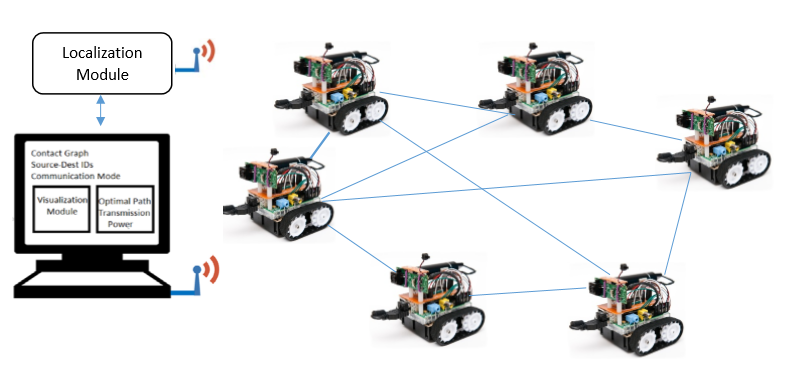
Our design consists of five robots controlled with Raspberry Pi’s that communicate to a server which is controlled by a computer.
The robots would be localized using the Camera + LIDAR system.
Implementation
The system starts on the computo, in which the user would input path preference and function ( functions include ; power efficiency,
transmission speed efficiency). When the user is done inputting commands through the GUI the system would proceed onto executing the commands.
The camera would take pictures every one second and sends that picture to the server in which the picture would be analyzed by a program called
“ Zxing” which is a QR Code camera recognition system (Based in Java). Using the QR code reader, the Robots would be identified (Due to the QR codes being printed on
the platforms themselves). Then a series of calculations are made to compute distances between the robots and our grid edge, this would mean that location data on
each of our robots is available. THese distance calculations would be checked by using the LIDAR sub-system (which is very accurate at determining distances).
After the completion of these tasks the platforms would execute the user commands.
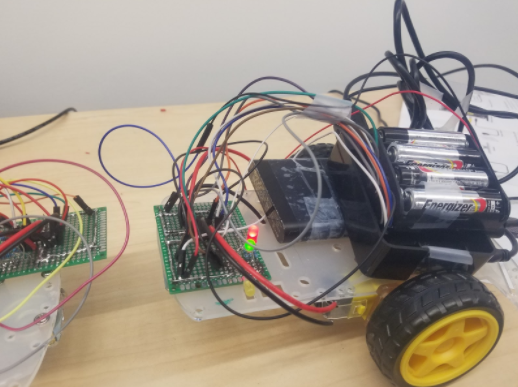
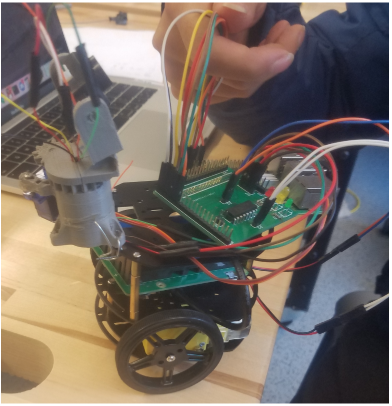
Prototype
This is our prototype.
For our prototyping phase, we decided to build two of the robots to test the system on a simple linear motion planned path.
In addition to this we developed the server so that these two robots can easily communicate with our computer and developed the QR Camera Recognition system.
With these Base systems running we are able to experiment and see whether the proposed method is more efficient than the conventional methods.
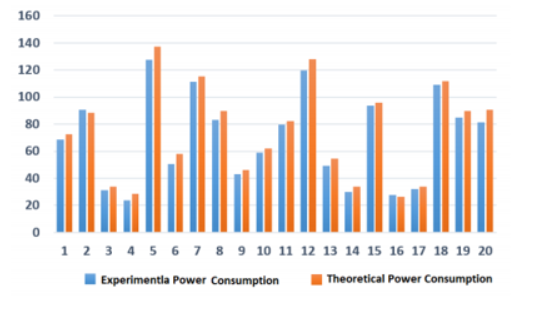
Experimentation And Simulation
For our experiment we decided to see whether transmission delays for our system were efficient. So we ran the program for 1 minute and programmed
the path to be a simple back and forth linear motion. THen we analyzed the video to check whether the calculated delay time is higher or lower
than our experimental results delay time. We did this twenty times and calculated the error between experimental results and calculated results.
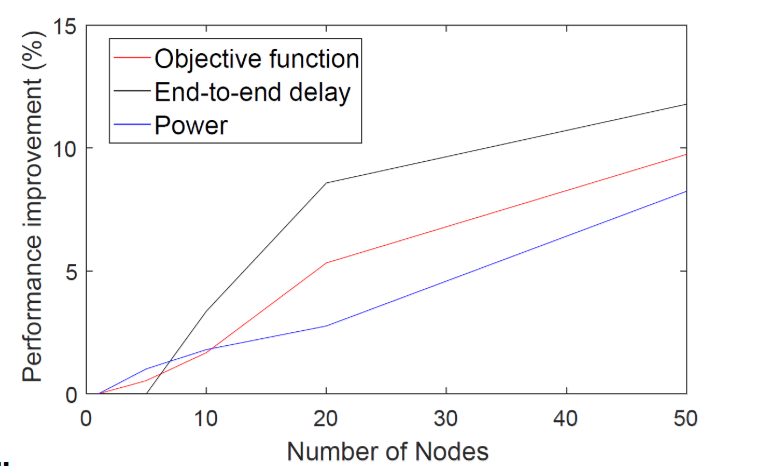
Our results show that if we had a system of 50 nodes then the proposed method is 10% more efficient in regards to power efficiency.
PROTOTYPE2
———————————————— —————————————————
second semester's research
Our objective is to finish the new prototype and complete the last part of GUI and LIDAR.
Develop a system for Predictive routing algorithm which enables a delay-optimal communication through incorporating
network topology prediction into the Dijkstra’s shortest path algorithm. In this work, we extend the proposed solution to
jointly optimize the end-to-end latency and total transmission power.
purpose
Improve current conventional routing techniques
Further increase our understanding in Autonomous Robotics
Various applications in Medical, Civilization, and Military
Further increase our understanding of Internet of things Concept
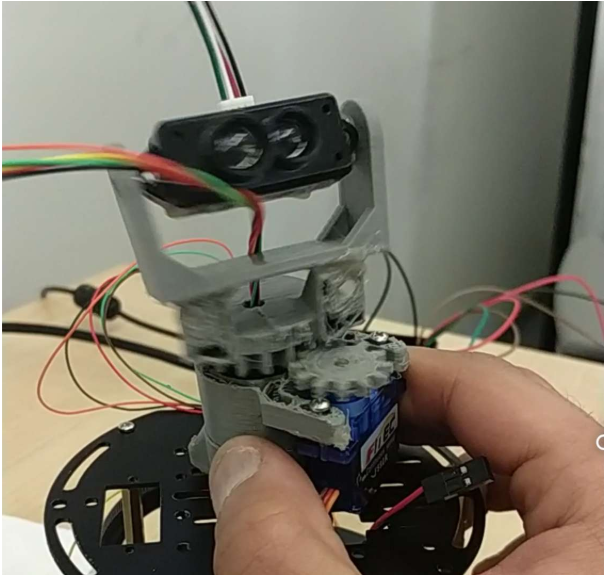
New Platform
We use 3D printer to print the LIDAR frame.We used two wheels robot car as the carrier.
Each wheel is driven by a separate motor.The robot car is divided into three layers.
Two motors were placed at the bottom layer.A battery pack (power supply system) is placed in the middle layer.
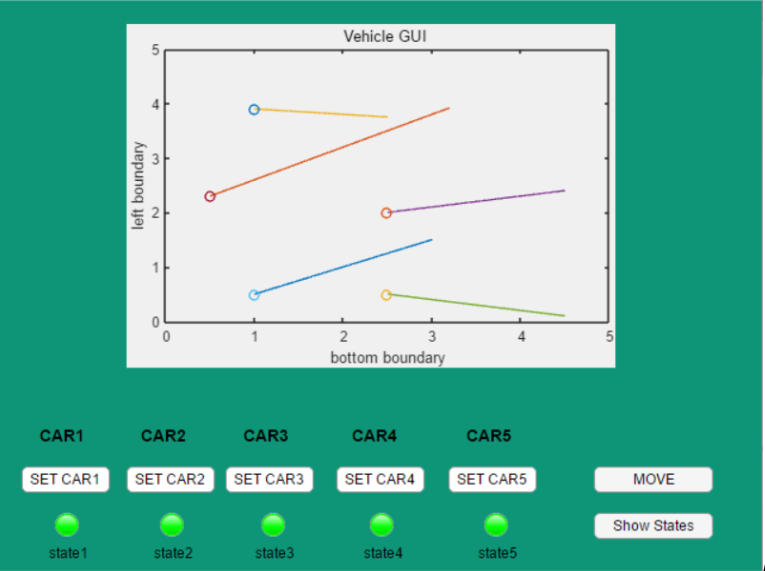
GUI System
Localization system provides positions to database, then database store these information
and sends them to GUI. GUI can use position information to show the user the five platforms.The Predictive algorithm
then uses the database information to calculate optimal paths and shows the user these paths through the user interface.
Communication System
(3D printed LIDAR system)
In our project, we implemented two different localization methods. One is centralized, and the other is distributed.
For the centralized one, we used a QR code/reader system to localize the robots. The basic idea is taking photos at a specific rate from above all 5 robots
which have a huge QR code on their top. We were able to recognize the location of each QR code therefore localizing the cars.
We use lidar as the distributed system. The invisible light which is transmitted by the robots and reflects back from objects. The robots can get the distance
by calculating the time of flight of the laser (TOF). After the robots get the distance between them and the reference points, we set the robot so it can get
the position by applying gps type tri-angle positioning algorithm.
reults
Localization system provides positions to database, then database store these information
and sends them to GUI. GUI can use position information to show the user the five platforms.The Predictive algorithm
then uses the database information to calculate optimal paths and shows the user these paths through the user interface.
FINAL REVIEW
———————————————— —————————————————
Conclusion of the project
We are pleased that you have chosen Predictive communications team for your needs. Due to the increasing complexity of current technology,
it is necessary to perform the proper research and implementation of methodologies in order to accommodate this increase in complexity.
Current Networking methods lack in efficiency when applied to dynamic fast moving networks. The proposed algorithm tries to fix the problem of
efficiency in regards to Power and End to End delay by providing a predictive routing algorithm that will increase efficiency by 10% for moderate sized networks ,
and more gains for larger networks. It is our job to provide a platform to test and evaluate the proposed algorithm. By creating a network of
five car robots operating in linear fashion, the user can test the efficiency gain of the proposed algorithm vs conventional techniques.
The system has been designed to the specifications of the client,some of these specifications include: Decentralized distributed system design;
Graphical user interface (GUI);Distributed localization method;Path prediction Interface.
Professor Razi’s guiding hand steered us in the proper direction during trivial times, which is much appreciated.
We hope that the client utilizes and benefits from the system to the highest degree.
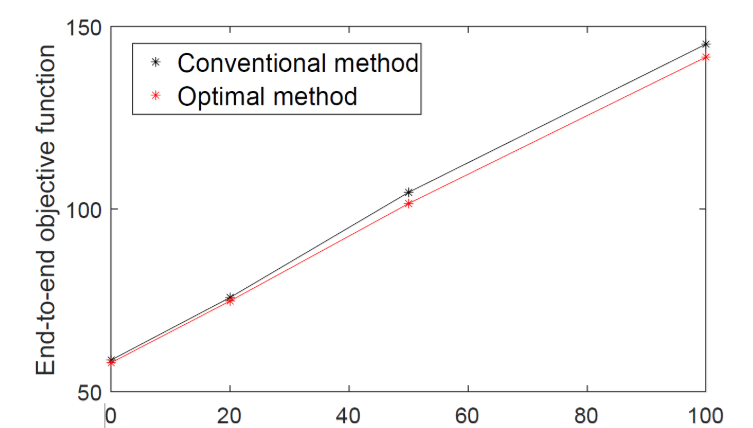
Result1
result1 shows the effect of the number of nodes in the
efficiency of the method proposed. It is observable that as
number of nodes in the network increases, the optimal algorithm exhibits a higher performance improvement in terms of delay and power utilization compared to the conventional algorithm.
Result2
result2 shows that as we increase the waiting time for each node, topology changes are more severe and we obtain higher gains by predicting network topology. Therefore, substantial benefits can be obtained for queued networks with heavy traffic mode.
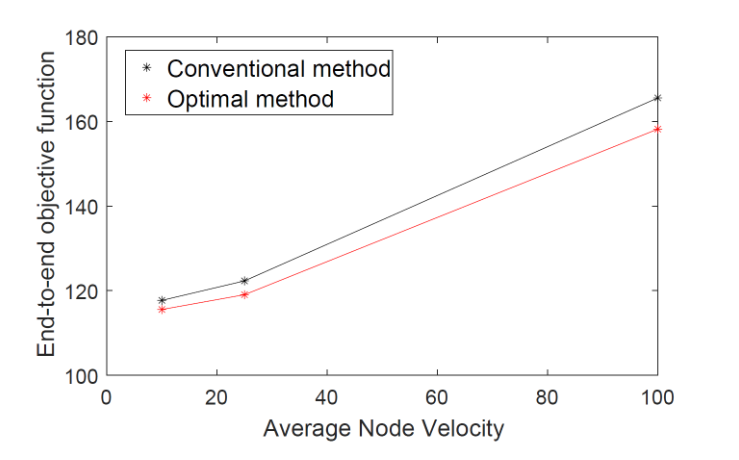
Result3
result3 shows the optimal method improves compared to the conventional, for higher node velocities the network topology is evolving rapidly ,the proposed algorithm
shows a better performance.
Simulation results confirm an improvement of about 10% for moderate network sizes. The performance gain increases for larger networks, larger average waiting time and higher node velocities.
DOCUMENTS
———————————————— —————————————————
Here is the document list about this project, you can download them.